Linear Algebra
linear system:
equivalent ∼—same solution set
consistent—have solution; inconsistent—no solutions
coefficient matrix:
augmented matrix:
row operation
replacement
interchange
scaling
row equivalent—same after proper row operation
⇒ equivalent matrix
entry—ai**j o**r ai, j o**r A[i, j]o**r Ai, j—the (i, j) entry of A
leading entry—leftmost entry of a nonzero row
(row) echelon form—step-like, leading entry going in to the right
echelon matrix
reduced echelon form—all leading entries are 1, entries below them are 0
an echelon form (REF) of…
the reduced echelon form (RREF) of…
only 1 for each matrix
pivot position—position corresponding to the leading entry of its reduced echelon form
pivot column—the column containing a pivot position
pivot—nonzero number in a pivot position
row reduction
forward phase—make pivots the leading entries
backward phase—eliminate non-pivots in pivot column
partial pivoting—use greatest entry in a column as the pivot for programming
solve linear system
basic variable—corresponding to pivot column
free variable—not so
solution set
element(s): 0—inconsisten**t o**r 1—consisten**t o**r ∞
parametric description—
back-substitution—solve for the basic variables one by one dealing with echelon form
existence and uniqueness theorem—consistent ⇔ no rightmost column as pivot column
vector equation— x1a1 + … + xnan = b
column vector
solution for vector equation x1a1 + … + xnan = b equivalent to solution of
Spa**n{v1,⋯, vp}—subset of ℝn spanned (/generated) by v1,⋯, vp—the set of all linear combinations of v1,⋯, vp
b ∈ spa**n{a1, ⋯, an} ⇔ A has a pivot in every row
matrix equation Ax = b:
Ax = b solution equivalent to x1a1 + … + xnan = b
existence of solutions—has solution iff b ∈ Spa**n{a1, ⋯, an}
{v1, ⋯, vp} spans (/ generates) ℝm if Spa**n{v1, ⋯, vp} = ℝm
identity matrix In,
Inx = x ∀ x ∈ ℝn
homogeneous linear system—can be writen as Ax = 0
opposite: heterogeneous
at least 1 solution x = 0, a.k.a. trivial solution
nontrivial solution iff ∃free variable
parametric vector form— x**=su** + tv (s, t ∈ ℝ) parametric vector equation of the plane
solution representation
vector
parameter vector form— x = p + tv (t ∈ ℝ) the equation of the line through p parallele to v
span
solution set of Ax = b— {w|w = p**+vh} i**f ∃solutio**n p ∀solutio**n o**f Ax** = 0 vh
linear dependency of matrix columns
a1⋯an of A are linearly independent ⇐ Ax = 0 has only the trivial solution
dependent ⇐ ∃ c1⋯cn, c1a1 + ⋯ + cnan = 0
more vectors than entries in each vector ⇒ linearly dependent
linearly dependent ⇔ at least one vector = linear combination of the others
⇒ ∃vj (j > i), vj is a linear combination of v1…vj − 1 if {v1…vp} is linearly dependent AND v1 ≠ 0
contains 0 ⇒ linearly dependent
linear transformation
transformation (/ function / mapping) T : ℝn → ℝm
domain ℝn
codomain ℝm
image T(x)
range: set of all images
matrix transformation x ↦ Ax
⇔ ∀ u**,** v, c, d, T(cu + dv) = c**T(u) + d**T(v)
kernal Nul A
range Col A
matrix operations
diagonal entry—ai**i
main diagonal
diagonal matrix—square matrix with all non-diagonal entries 0
zero metrix 0
vector multiplication
A(Bx)=(A**B)x
row-column rule—
*
A is right-multiplied by B, B is left-multiplied by A
A, B commute—A**B = B**A
power of matrix
A0 is the identity matrix
transpose matrix AT
(A**B)T = BTAT
matrix inversion
invertible—for n × n matrix A, ∃ n × n matrix C, C**A = In = A**C
C: an inverse of A
(non)singular matrix—(not) invertible
2 × 2 matrix iff det A = a**d − b**c ≠ 0
∀ invertible n × n matrix A, b ∈ ℝn, Ax = b ⇒ x**=**A−1b
(A**B)−1 = B−1A−1
(AT)−1 = (A−1)T
only product of invertible matrices is invertible
for n × n matrix: A is invertible
⇔ row equivalent to In
⇔ linear transformation x**↦Ax** is one-to-one
⇔ ∀ b**∈ℝn, Ax** = b has solution
⇔ linear transformation x**↦Ax** maps ℝn ***o***nto ℝn
⇔ ∃ n × n matrix C, C**A = I
⇔ ∃ n × n matri**x D, A**D = I
⇔ AT is invertible ⇔ det A ≠ 0
⇔ columns of A forms a basis of ℝn
⇔ Col A = ℝn
⇔ 0 is not an eigenvalue of A
⇔ det A ≠ 0
invertible linear transformation T : ℝn**↦ℝn—∃ S : ℝn↦**ℝn, ∀ x ∈ ℝn, S(T(x)) = x, T(S(x)) = x
S—the inverse T−1
elementary matrix—obtained by performing a single elementary row operation on identity matrix
roo**p A = E**A, where E = roo**p Im, roo**p is the single elementary row operation
elementary matrix E is invertible, E−1 is another elementary matrix obtained by reversed row operation
n × n matrix A is invertible iff row equivalent to In
A−1 = roo**p In if In = roo**p A
find A−1—row reduce and get
LU fractorization—A = L**U
A : m × n matrix
L : m × m unit lower triangular matrix
lower triangular matrix—entries above the main diagonal are 0s
U : m × n echelon matrix
implementation—
calculation: p. 145
determinant
A is quare matrix
usually use i = 1 the first row
origin—the last pivot in echelon form of the matrix obtained without division
Ai**j—obtained by deleting the ith row and jth column in A
(i, j)-cofactor Ci**j = (−1)i + jdet Ai**j
cofactor expansion across the ith row of A—
triangular matrix A— the entries on the main diagonal
row/ column operation
replacement—same
interchange—opposite
scaling—scales the same way
echelon form U by row replacements and r interchanges
det A = det AT
det A**B = (det A)(det B) proved using elementary matrices
if A is invertible
det k**A = kndet A if A has n rows
linearity property—linear transformation where only x is a variable
Cramer’s rule—the unique solution of Ax = b has entries
A is invertible n × n matrix, b ∈ ℝ
Laplace transfrom—converts system of linear differential equations to system of linear algebraic equations
a way to find A−1—A(A−1)j = (In)j
adjugate/ classical adjoint of A—
determinant as area or volume
area of parallelogram of 2 × 2 matrix A is |det A|
volume of parallelepiped of 3 × 3 matrix A is |det A|
linear transformation T : ℝ2 → ℝ2 (ℝ3 → ℝ3) determined by 2 × 2 (3 × 3) matrix A ⇒ {are**a (volum**e) o**f T(S)} = |det A| ⋅ {are**a (volum**e) o**f S}
vector space—10 axioms
subspace—3 axioms needed
0 ∈ H
H is closed under vector addition—u + v ∈ H
H is closed under multiplication by scalars—cu ∈ H
Spa**n{vi} is a subset of vector space V if vi ∈ V
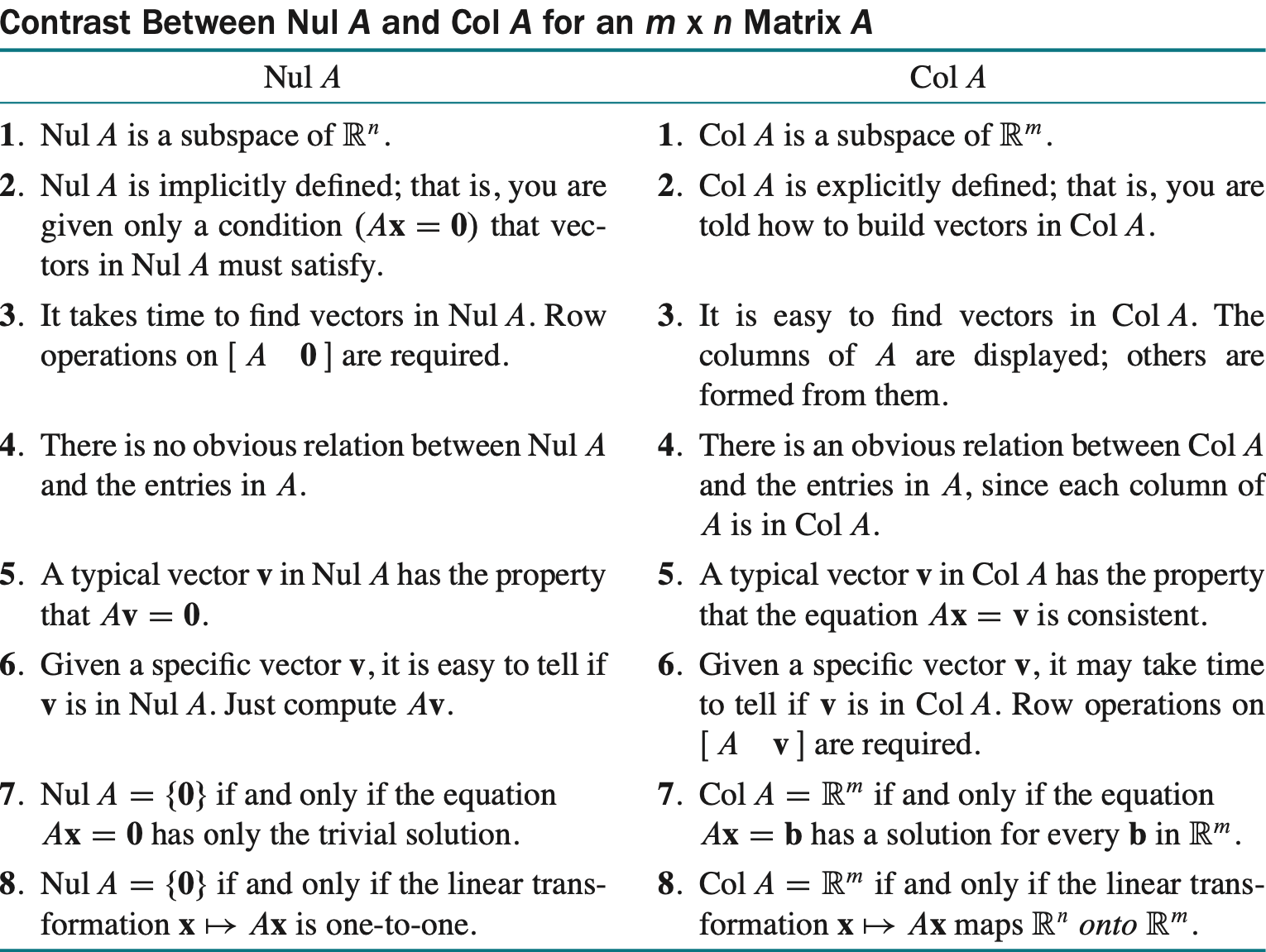
null space of A, Nul A—solution set of Ax = 0
—is a subspace of ℝn
explicit discription—with the vectors that span Nul A
basis—solve and represent with free variables
dim Nul A= number of free variables
column space of A, Col A—Spa**n{a1, ⋯, an}
—is a subspace of ℝm
Col A = {b : b**=Ax**, x ∈ ℝn}
Col A = ℝm iff ∀b ∈ ℝm, ∃x, Ax = b
basis—pivot columns
dim Col A= number of pivot columns
row space of A,
—is a subspace of ℝn
= Col AT
basis—pivot rows
kernal/ null space of linear transformation T—T(u) = 0
basis Β of subset H—linearly independent, span H
standard basis for ℝn {e1, ⋯, en}
spanning set A small AP
linearly dependent set A big AP
coordinate system
the unique representation theorem
Β-coordinates of x—scalars that map them
Β-coordinate vector of x—
coordinate mapping x ↦ [x]Β
it is a one-to-one linear transformation—isomorphism
x = PΒ[x]Β, where change of coordinate matrix PΒ = [b1, ⋯, bn]
dimension
finite-dimensional vector space—spanned by finite set
0 dimension—{0}
infinite-dimensional
dim ℙn = n + 1
rank—dim Col A
rank thm—ran**k A + dim Nul A = n
an eigenvector corresponding to λ—x ≠ 0, Ax = λx, A i**s n × n
an eigenvalue of A—λ
main diagonal entries on triangular matrix
0 is an eigenvalue of A iff A is not invertible
find eigenvector x given eigenvalue λ: Ax = λx ⇒ (A − λ**I)x = 0
(A − λ**I)T = AT − λ**I
eigenspace of A—Nul (A − λ**I)
characteristic equation of A—det (A − λ**I) = 0
⇔ λ is an eigenvalue of A
characteristic polynomial of A (with degree n)
multiplicity of eigenvalue λ—the multiplicity as root
similarity—∃P invertible, P−1A**P = B
PBP−1 = A
A, B are similar
similarity transformation—A → P−1A**P
same characteristic polynomial and same eigenvalues
diagonalize—A = PDP−1 where D is diagonal
diagonalizable—∃P, D
⇔ A has n linearly independent eigenvectors
⇔ ∑dimensions of eigenspaces = n
⇔ characteristic polynomial factors completely into linear factors
⇔ dimension of eigenspace for each λ= multiplicity
⇔ basis of all eigenspaces form a basis of ℝn
⇐ A has n distinct eigenvalues
diagonizing—find eigenvalues ⇒ D; find eigenspace basis ⇒ P; check A**P = P**D
vector operation
inner product (dot product)—u ⋅ v**=**uTv
length—
normalizing—get unit vector in the same direction as nonzero vector
distance dis**t(u**,** v) = ∥u − v∥
orthogonal relationship
orthogonal—u ⋅ v**=**0
⇔ ∥u + v∥ = ∥u∥ + ∥v∥
orthogonal complement W⊥—the set of all vectors orthogonal to subspace W
is a subset of ℝn
interactive—A⊥ = B ⇔ B⊥ = A
(Row A)⊥ = Nul A
(Col A)⊥ = Nul AT
orthogonal set—ui**⋅**uj = 0 ∀ i ≠ j
⇒ linearly independent
is a basis for the subspace
orthogonal basis—basis that is orthogonal set
weight— for y ∈ Spa**n{uj}
orthogonal projection—
where z**⊥**u
subspace L spanned by u
orthonormal set—unit vector orthogonal set
orthonormal basis—basis that is orthonormal set
Gram-Schmidt process—calculate orthonormal basis by subtracting projection
QR factorization—orthonormal basis of linearly independent matrix Q, R = QTA
orthogonal matrix—square matrix with orthonormal columns
⇔ U−1 = UT
⇔ orthonormal rows
∥Ux∥ = ∥x∥
(Ux) ⋅ (Uy) = x ⋅ y
Ux⊥Uy ⇔ x**⊥**y
product of orthogonal matrix is orthogonal matrix
orthogonal projection—
for U of orthonormal basis ui
best approximation theorem— is the closest point in W to y
general least-square problem—find x for smallest least-square error ∥b − Ax∥
⇔ normal equation—ATAx = ATb
ran**k ATA = ran**k A
Ax = b has a unique least-square solution ∀ b ∈ ℝm
⇔ A is linearly independent
⇔ ATA is invertible
Χβ**=**y
design matrix—Χ
parameter vector—β
observation vector—y
least-square line (line of regression)—y = β0 + β1x
observed value—yi
predicted value—β0 + β1xi
residual—β0 + β1xi − yi
Χβ = y where
residual vector ϵ
diagonalization of symmetric matrix
symmetric matrix—AT = A
eigenvectors from different eigenspaces are orthogonal
orthogonally diagonalizable—could have orthogonal matrix P
A = PDP−1 = PDPT
⇔ A is symmetric
spectral decomposition—
where ui are the columns of P
uiuiT is a projection matrix—pro**j{ui}x**=**(uiuiT)x
single value decomposition SVD—A = UΣVT
left singular vectors form U is m × m orthogonal
is m × n
, σ1 ≥ ⋯ ≥ σr > 0
right singular vectors form V is n × n orthogonal
∀ m × n matrix A, ATA is symmetic
its eigenvalues λ1 ≥ ⋯ ≥ λi ≥ ⋯ ≥ 0
single values—
for {v1, ⋯****,vn} with eigenvectors of ATA correponding to λ1 ≥ ⋯ ≥ λi, and A has r nonzero singular values, {Av1, ⋯****,Avr} is an orthogonal basis for Col A, ran**k A = r
find single value decomposition
find orthogonal diagonalization of ATA—P, D′
V = P to orthonomal = {vi}
D and Σ
U—