Probability and Statistics
⌊x⌋= the greatest integer smaller than x
sequence
index variable
explicit formulas
recurrence relation
arithmetic sequences
geometric sequences
bounded above/ below
(un)bounded
convergent ⇒ bounded
bounded, monotone ⇒ convergent
series
convergent vs divergent series
harmonic sum
p series:
convergent ⇒ limn → ∞an = 0
limn → ∞an ≠ 0⇒ divergent
tests
divergence test
partial sum
geometric: |q| < 1
integral: f, f(n) = an, continuous, ultimately decreasing 🡪 same
comparison:
scaling with or
alternating: |an + 1| − |an| < 0, ∀ n > n0, limn → ∞an = 0⇒ convergent
absolute convergence: convergent
conditional convergence: convergent, but divergent
convergent convergent
ratio:
root:
uniform convergence:
fn(x) converge to f(x): fn(x) → f(x) as n → ∞
∃N(ε) independent to x, ∀n > N, |fn(x) − f(x)| < ε⇔ uniform convergence: fn ⇉ f
dominated convergence: fi(x) → f(x) as x → ∞, ∃g, ∀x, i, fi(x) < g(x) ⇒ limi → ∞∫abfi(x)d**x = ∫abf(x)d**x
power series:
center a, coefficient cn
⇒ x = a⇔ convergent
or ∀x ∈ ℝ, convergent
or ∃R > 0, |x − a| < R⇒ convergent, |x − a| > R⇒ divergent
method: , radius of convergence
|x − a| < R⇒ absolutely convergent, |x − a| > R⇒ divergent from ratio test
Bessel function of the first kind:
basic formula:
plug out terms, create (x − a), see something as 1 − x, do it, range
Taylor and Maclaurin Series:
for |x| < 1
for |x| < 1
differentiation and integration: ,
may lose boundary of convergence
Cauchy product: ,
probability
sample space S: nonempty set
collection of events: subset of S: P(S)
probability measure P(A) ∈ [0, 1], P(⌀) = 0, P(S) = 1
if Ai… are mutually disjoint
symmetric difference: AΔB = (A ∖ B) ∪ (B ∖ A)
complement: Ac : = S ∖ A
disjoint: A ∩ B = ⌀ ⇔ A ⊆ Bc ⇒ A ∖ B = A ∩ Bc
De Morgan Laws: (A ∪ B)c = Ac ∩ Bc, (A ∩ B)c = Ac ∪ Bc
A = B ⇔ A ⊆ B, B ⊆ A
cardinality: |A|= # of elements in A
inclusion-exclusion principle: |A ∪ B| = |A| + |B| − |A ∩ B|, |A ∪ B ∪ C| = |A| + |B| + |C| − |A ∩ B| − |A ∩ C| − |B ∩ C| + |A ∩ B ∩ C|
partition of the sample: Bi, disjoint, S = B1 ∪ B2 ∪ …
P(A) = P(A ∩ B1) + P(A ∩ B2) + …
P(A ∖ B) = P(A ∩ Bc) = P(A) − P(B)
not necessarily disjoint: P(A1 ∩ A2 ∩ …) ≤ P(A1) + P(A2) + …
independent: P(A ∩ B) = P(A)P(B) for two events, and P(A1 ∩ … ∩ Ai) = P(A1)…P(Ai) for more events
uniform probability:
continuous uniform distribution: , [x, y] ⊂ [a, b]
combinatorics: length k, n symbols ⇒ nk
ordered subset
binomial:
generating function:
exponential generating function:
Bayes’ theorem:
random variable X(bla) = 2
discrete:
PDF probability mass/ density function: pX(x) = P(X = x)
law of total probability:
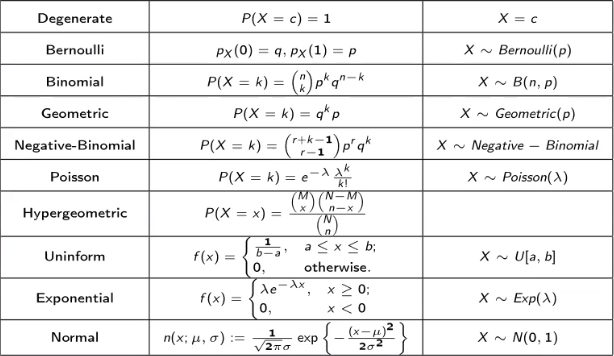
Bernoulli: pX(0) = q, pX(1) = p
Binomial:
rX(t) = (t**p + q)n
geometric: pX(k) = p**qk
negative-binomial:
Poisson:
E(X) = var(X) = λ
hypergeometric:
continuous distribution: pX(k) = 0 ∀ x ∈ ℝ,∫−∞∞f(x)d**x = 1
uniform:
exponential:
P(x ≥ t) = e−λ**t
normal:
gamma:
Γ(x + 1) = x**Γ(x)
chi-squared: Χ2(n) is the distribution of Z = X12 + … + Xn2 with Xi ∼ N(0, 1)
E(Z) = n
for z ≥ 0 if n = 1
t (or student): t(n) is the distribution of with Xi ∼ N(0, 1)
CDF cumulative distribution fun
joint distributions Y = h(X)
if X discrete, then
if X continuous, h(x) monotone where fX(x) > 0, then
marginal distribution: FX(x) = limy → ∞FX, Y(x, y)
joint probability fun
marginal PDF: table
joint density fun: f(x, y), ∫−∞∞∫−∞∞f(x, y)dxd**y = 1
marginal PDF fX(x) = ∫−∞∞fX, Y(x, y)d**y
independent
or f
continuous:
law of total prob: P((X, Y) ∈ B) = ∬BfX(x)fY|X(y|x)dxd**y
independent random variables: ∀B1, B2, P(X ∈ B1, Y ∈ B2) = P(X ∈ B1)P(Y ∈ B2)
expectation: E(X**Y) = E(X)E(Y) if X, Y independent
variance: var(X) = E((X − μx)2) = E(X2) − E2(X), var(X + Y) = var(X) + var(Y) + 2cov(X, Y)
covariance: cov(X, Y) = E((X − μX)(Y − μY)) = E(X**Y) − E(X)E(Y)
cov(a**X + b**Y, Z) = a cov(X, Z) + b cov(Y, Z)
correlation:
i.i.d. mutually independent and identically distributed
X1, …, Xn ∼ Bernoulli(p) i. i. d. ⇒ X1 + … + Xn ∼ B(n, p)
X1 ∼ B(n1, p), X2 ∼ B(n2, p) ⇒ X1 + X2 ∼ B(n1 + n2, p)
X1 ∼ Poisson(λ1), X2 ∼ Poisson(λ2) ⇒ X1 + X2 ∼ Poisson(λ1 + λ2)
generating fun: rX(t) = E(tX)
rX + Y(t) = rX(t)rY(t)
kth moment: E(Xk)
kth central moment: E((X − μx)k)
moment-generating fun:
MX(k)(0) = E(Xk)
MX + Y(s) = MX(s)MY(s) X, Y independent, work for rX(t)
uniqueness: if ∃s0 > 0, MX(s) < ∞ ∀s ∈ (−s0, s0), MX(s) = MY(s), then X, Y have the same distribution also work for r
characteristic fun: cX(s)= E(eiXs)
inequalities
Markov’s: X ≥ 0, a > 0
Chebychev’s: a > 0
Cauchy-Schwarz:
=, iff if var(Y) > 0
law of large number
sample sum: Sn = X1 + … + Xn for {Xi} i. i. d.
sample average:
WLLN weak: limn → ∞P(|Mn − μ| ≥ ε) = 0 for {Xi} same μ, var ≤ v, v < ∞, ε > 0 not necessarily i. i. d.
SLLN strong: P{limn → ∞Mn = μ} = 1 for {Xi} i. i. d.
x
central limit theorem: limn → ∞P(Zn ≤ x) = P(Z ≤ x) for {Xi} i. i. d, Z ∼ N(0, 1),
convolution: for X, Y independent, Z = X + Y
discrete:
continuous: fZ(z) = ∫−∞∞fX(z − w)fY(w)d**w
different convergence
: {Xn} converges in probability to Y, if limn → ∞P(|Xn − Y| ≥ ε) = 0
: {Xn} converges with probability 1 (almost surely) to Y, if limn → ∞P(Xn = Y) = 1
: {Xn} converges in distribution to Y, if limn → ∞P(Xn ≤ x) = P(Y ≤ x) ∀ x ∈ {x|P(Y = x) = 0}
sample
sample variance:
kth sample moment:
point estimation
the method of moments:
MLE maximum likelihood estimation: make L big as possible
maximum likelihood fun: L(θ; x1, …, xn) = p(X1 = x1, …Xn = xn|θ) or f
x1, …, xn independent:
good point estimator
unbiased: E(θ̂n) = θ
consistent:
mean squared error E((θ̂n − θ)2) is small
confidence interval: P(θ̂n− ≤ θ ≤ θ̂n+) ≥ 1 − α
⇐ P(a ≤ g(θ) ≤ b) ≥ 1 − α
N, t: let −b = a,
Χ2: let
deal with Xi ∼ N(μ, σ2)
μ = μ0:
hypothesis testing
null hypothesis H0
type I/ II error: H0 true/ false
level of significance α: probability for type I error
power of the test 1 − β, β: probability for type II error
p-value: probability that H0 is true
reject if p-value < α
for {Xi ∼ N(μ, σ02)} i.i.d., use
for two samples,
linear regression
linear least squares
correlation coefficient:
standard statistical model: Yj = β0 + β1xj + ej, j = 1, 2, …, n
E(ej) = 0, var(ej) = σ2
intercept β0, slope β1, residual ej
estimators
E(β̂0) = β0, E(β̂1) = β1
if ej ∼ N(0, σ2) i.i.d., then β̂0, β̂1 normal dist
sum of squared errors SSE:
independent of β̂0, β̂1
1 − α confidence interval for β̂0, β̂1
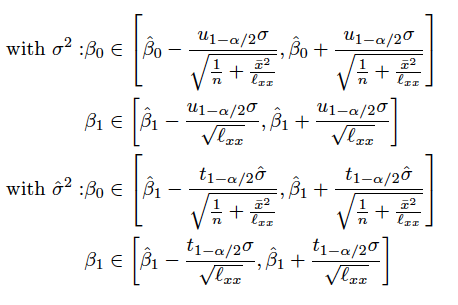
1 − α confidence interval for σ2
1 − α confidence interval for y0 = E(ŷ0):